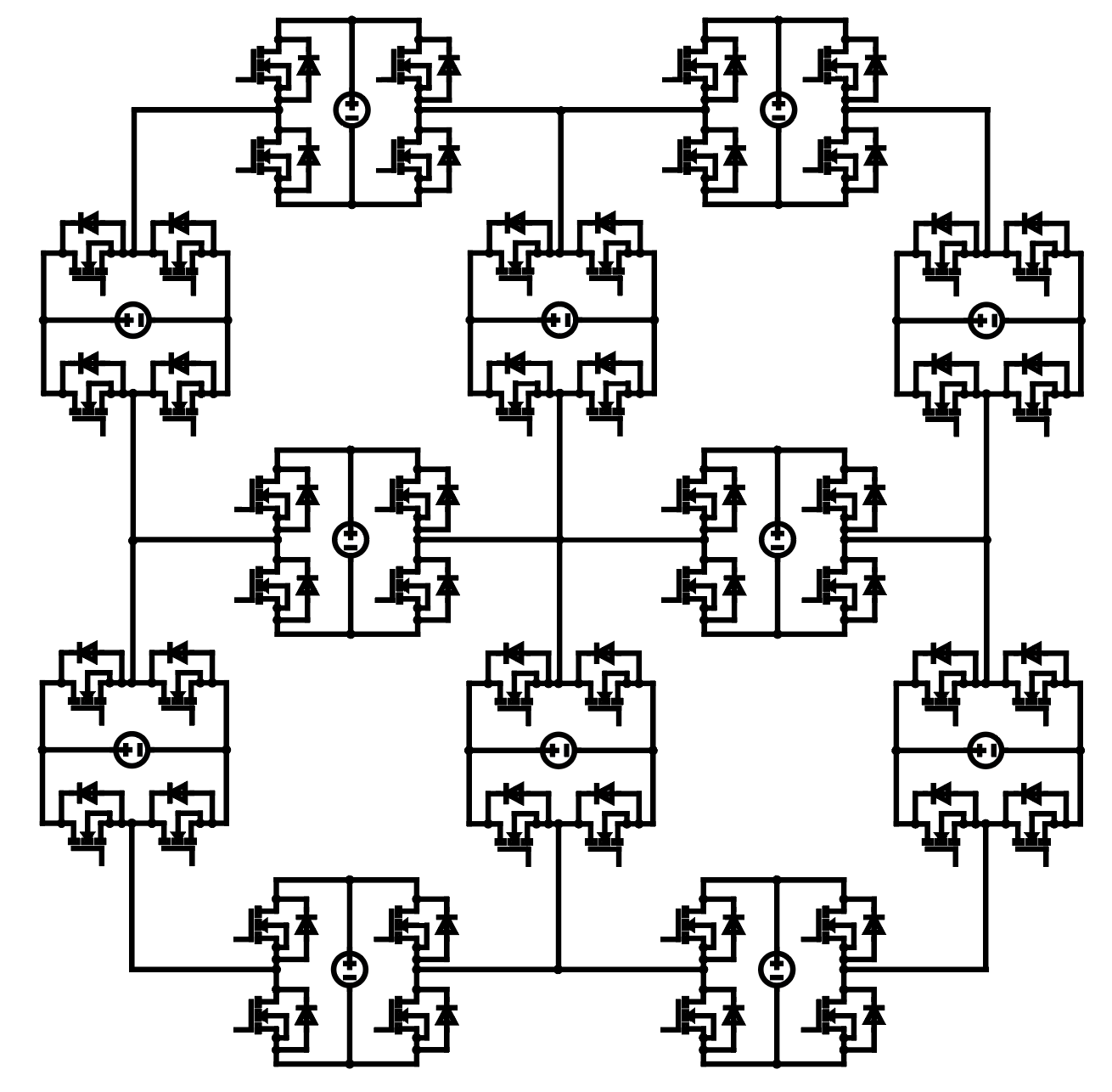
Multilevel converters continue their upward trend in renewable generation, electric vehicles, and power quality conditioning applications. Despite having satisfactory voltage capabilities, mainstream multilevel converters suffer from poor current sharing performances, thereby leading to the development of lattice converters, i.e., a strong and versatile type of future multilevel power converters. This article addresses two problems faced by lattice converters. First, we propose and detail how to optimize the efficiency of a given lattice converter by controlling the on/off states of H-bridge submodules. Second, we introduce the method that determines the voltage at each node of the converter in order to satisfy output voltage and current requirements. Design and analysis of lattice converters need a different mathematical toolbox than routinely exercised in power electronics. By use of graph theory, this article provides control methods of 3 × 3 and 4 × 4 lattice converters, satisfying various control objectives such as input/output terminals and output voltages. We further validate the methods with simulation results. The methodologies, algorithms, and special cases described in the article will aid further design and refinement of more efficient and easy-to-control lattice converters.
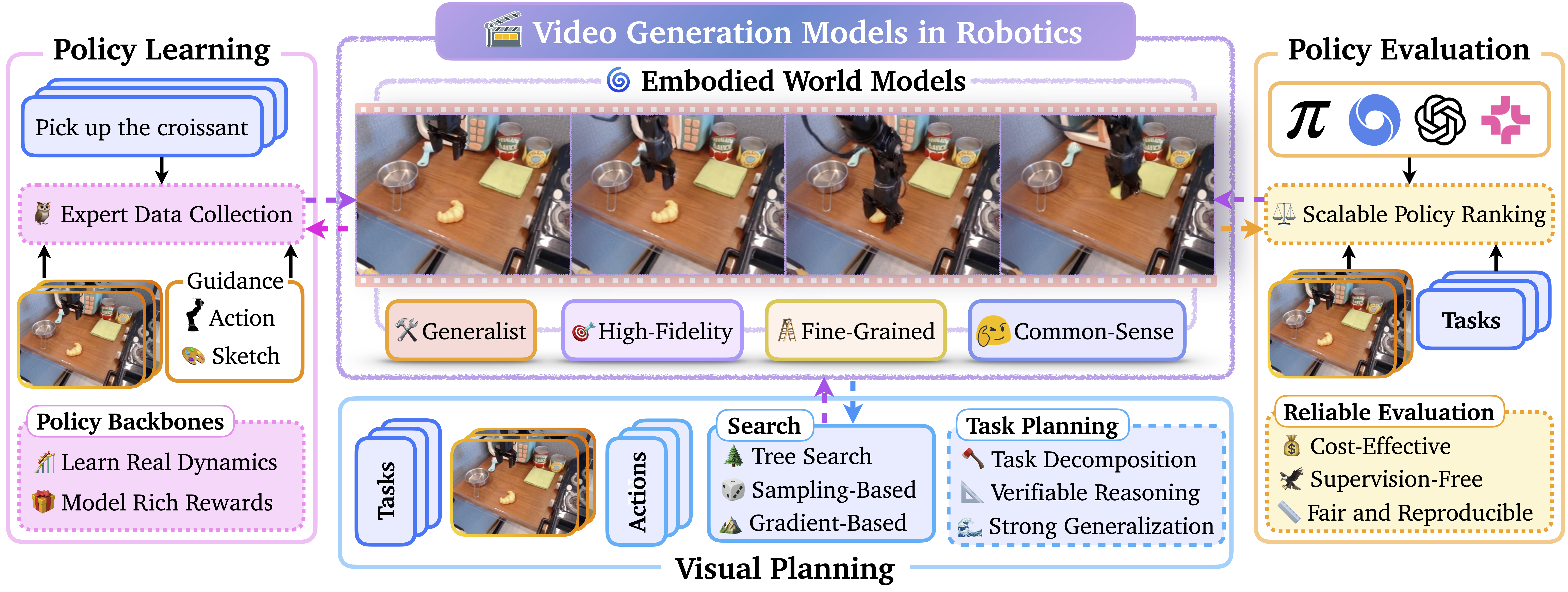 Video Generation Models in Robotics-Applications, Research Challenges, Future DirectionsarXiv preprint arXiv:2601.07823, 2026
Video Generation Models in Robotics-Applications, Research Challenges, Future DirectionsarXiv preprint arXiv:2601.07823, 2026